
- 300
- 产品价格:面议
- 发货地址:河北石家庄长安区 包装说明:不限
- 产品数量:100000.00 个产品规格:不限
- 信息编号:251226271公司编号:14387553
- 李老师 微信 13833466981
- 进入店铺 在线留言 QQ咨询 在线询价
北京cnc数控编程大概学多久 零基础学习
- 相关产品:
河北德玛数控培训学校学生直接面对客户,我们车间主要承揽各种异形件,经常客户坐在学生身边,按照客户要求把产品做出来。将来去工厂上班也是这样面对客户的。
掌握基础原理和必要的科技文化知识;掌握必需的数学和英语基础知识;掌握机械制造知识;掌握必需的电工、电子技术知识;掌握微机与应用知识;掌握数控原理、数控机床和数控加工编程知识;数控机床的故障诊断与维修的知识。20世纪60年代以前为阶段,这一阶段称为初级阶段。在这一时期,人们自觉不自觉地利用电子技术的初步成果来完善机械产品的性能。特别是在*二次世界大战期间,了机械产品与电子技术的结合,这些机电结合的技术,战后转为民用,对战后经济的恢复起了积的作用。那时研制和开发从总体上看还处于自发状态。由于当时电子技术的发展尚未达到一定水平,机械技术与电子技术的结合还不可能广泛和深入发展,已经开发的产品也无法大量推广。
折叠
20世纪70~80年代为*二阶段,可称为蓬勃发展阶段。这一时期,计算机技术、控制技术、通信技术的发展,为机电一体化的发展奠定了技术基础。大规模、**大规模集成电路和微型计算机的迅猛发展,为机电一体化的发展提供了充分的物质基础。这个时期的特点是:①mechatronics一词先在日本被普遍接受,大约到20世纪80年代末期在世界范围内得到比较广泛的承认;②机电一体化技术和产品得到了大发展;③各国均开始对机电一体化技术和产品给以很大的关注和支持。
20世纪90年代后期,开始了机电一体化技术向智能化方向迈进的新阶段,机电一体化进入深入发展时期。一方面,光学、通信技术等进入了机电一体化,微细加工技术也在机电一体化中崭露头脚,出现了光机电一体化和微机电一体化等新分支;另一方面对机电一体化系统的建模设计、分析和集成方法,机电一体化的学科体系和发展趋势都进行了深入研究。同时,由于人工智能技术、网络技术及光纤技术等领域取得的巨大进步,为机电一体化技术开辟了发展的广阔天地。这些研究,将促使机电一体化进一步建立完整的基础和逐渐形成完整的科学体系。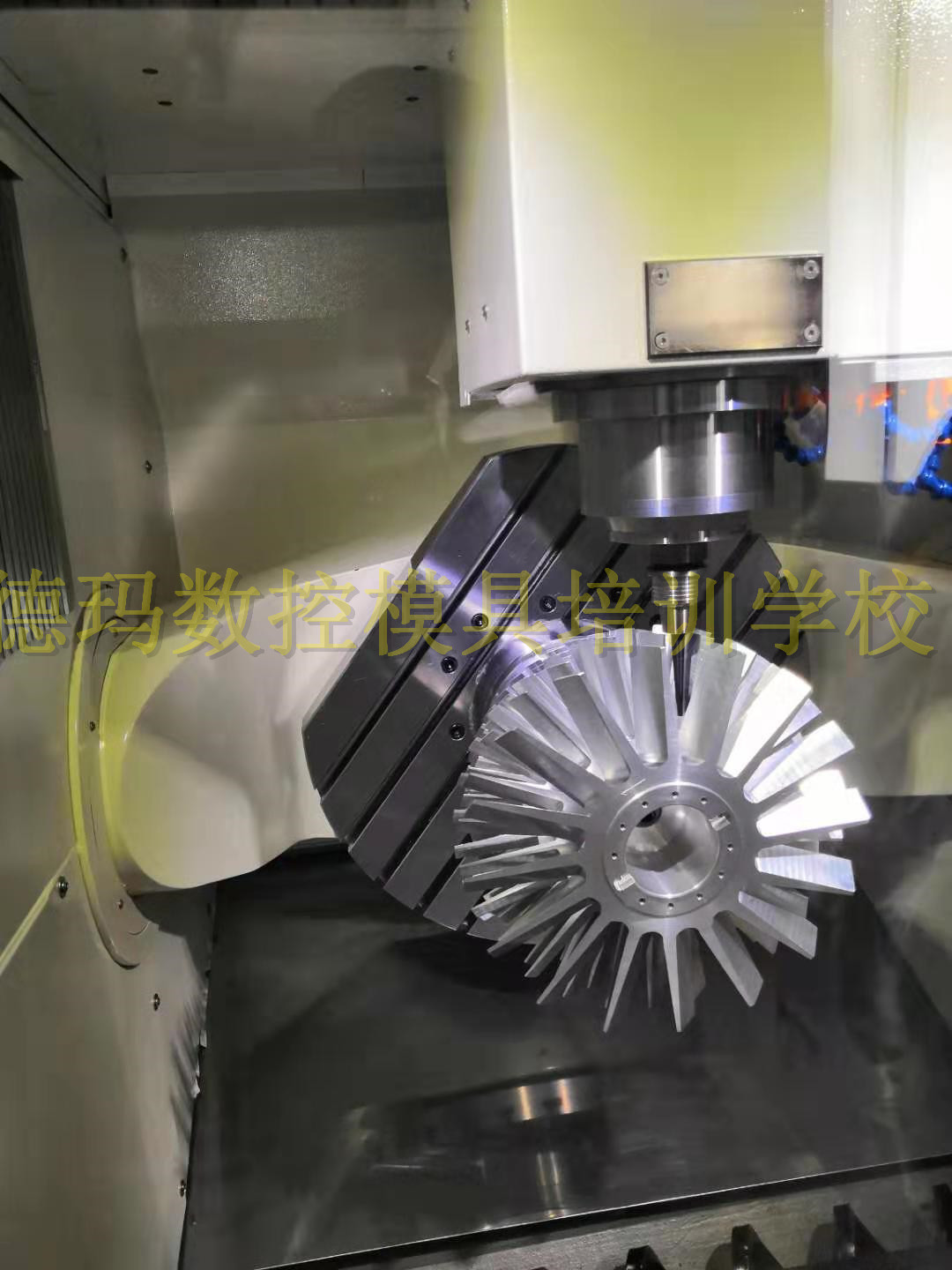
机械本体是矫形机器人系统的具体执行机构,直接和手术对象接触. 所以它的结构需要适应手术室的环境,在材料上、构型上要考虑手术任务和安全的需要. 在矫形手术中,机器人机械本体的功能一般包括:路径导航和操作.路径导航的任务可以概括为:根据的规划指令,将手术器械的运动路径在手术空间中固定下来,避免由于人为因素引起偏离手术路径的误操作,比如髓内钉手术中进行髓内钉远端锁孔的操作.机器人机械本体结构的操作功能可以概括为:根据的规划指令,直接在手术对象上进行某些手术操作. 如在关节置换手术中,根据的规划,机器人将关节磨削成既定的曲面.
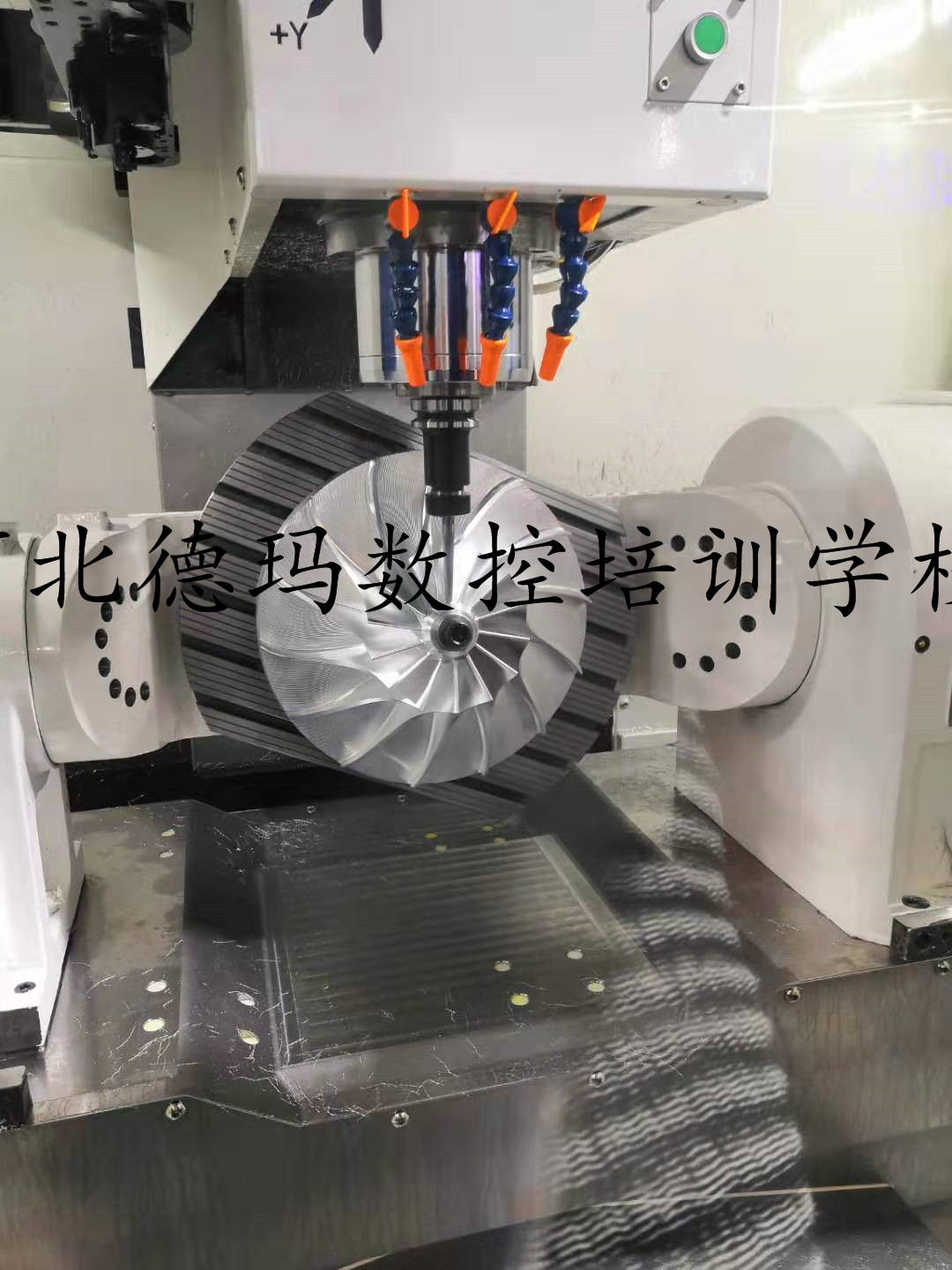
柔性大,适应性强
多轴联动、改变加工零件时,只需更换NC程序。适应多品种小批
量生产。
可以实现一机多用,工序集中
自动换刀的加工中心,在一次装夹的情况下,几乎可以完成零件的
全部加工工序。减少装夹误差,节约工序之间的运输、测量和装夹
等时间。
《机械技术》根据机械的课程特点和教学实际需要,对原**械类课程进行了较大的调整,将机械基础、金属材料与热处理、工程力学、机械加工工艺、数控加工等内容融为一体,**了以能力培养为主的职业教育特点。滑动轴承的失效形式及维护滑动轴承失效形式磨料磨损轴承在运转中灰尘、砂料、金属屑等硬质颗粒会进入轴承或轴颈表面,使轴颈和轴承表面产生磨料磨损。随着使用过程的变化,磨粒磨损的加剧可导致轴颈和轴承几何形状改变,失去原来的精度,使轴承的间隙,轴承性能降低,寿命缩短。刮伤进入轴承间隙的硬质异物或轴颈表面粗糙的凸峰,使轴承内表面上划出线状伤痕,致使轴承刮伤失效。
河北德玛数控培训学校U品加工编程培训
1 UG编程的基础内容.
2 D加工操作表面加工,墙面加工.
3 D加工操作开粗,光刀.
4 加工间距,切削参数设定
5 D文字插入及文字加工.
6 D挖槽加工.
7 IPW二次残料加工.
8 等高精加工
9 区域加工
10 轴投影加工.
11 沿面投影加工.
12 等高清角,D文字,钻孔加工.
13 编程实例讲解及复习









{kind=link}